



QGroundControl
QGroundControl leírása
A QGroundControl teljes repülésvezérlést és konfigurációt biztosít az ArduPilot vagy a PX4 Pro hajtású járművek számára. A QGroundControl célja az új felhasználók könnyebb használata, valamint a tapasztalt felhasználók számára nyújtott csúcskategóriás támogatás.
QGroundControl funkciók:
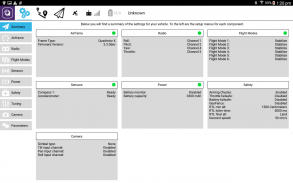
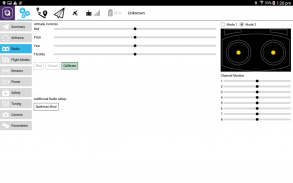
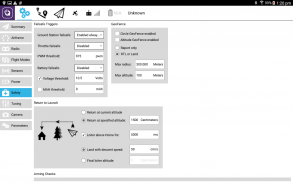
- Teljes konfigurációs támogatás a PX4 Pro és az ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub) futtató járművekhez
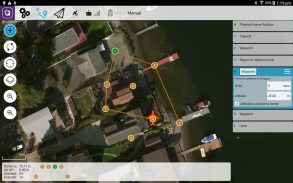
- Autonóm repülés tervezése
- Repülési térkép megjelenítése, amely bemutatja a jármű helyzetét, repülésállomását, útpontjait és járműszereit
- Videofelvétel eszközkijelzővel
- Repülési támogatás minden MAVLink képes járműhöz
A QGroundControl Windows, MacOS, Linux és iOS rendszereken is elérhető.
Kiadási megjegyzések
QGroundControl Hivatalos webhely
Dokumentáció
Támogatás
QGroundControl - 4.1.1 verzió
(29-01-2021)QGroundControl - APK információ
APK verzió: 4.1.1Csomag: org.mavlink.qgroundcontrolQGroundControl legújabb verziója
Egyéb változatok














Appok ebben a kategóriában

Ami még tetszhet...







